


自動駕駛技術(shù)是一項基于人工智能和感知技術(shù)的創(chuàng)新性技術(shù),它使汽車能夠在不需要人類干預(yù)的情況下自主駕駛。
用4級或5級來定義自動駕駛很難有一個明確的標(biāo)準(zhǔn),自動駕駛也不應(yīng)該搞得很復(fù)雜。自動駕駛實際包含三個問題:一是我在哪?二是我要去哪?三是如何去?能完整解決這三個問題就是真正的自動駕駛。所以特斯拉升級后的8000美元的Autopilot 2.0
用4級或5級來定義自動駕駛很難有一個明確的標(biāo)準(zhǔn),自動駕駛也不應(yīng)該搞得很復(fù)雜。自動駕駛實際包含三個問題:一是我在哪?二是我要去哪?三是如何去?能完整解決這三個問題就是真正的自動駕駛。所以特斯拉升級后的8000美元的Autopilot 2.0只有部分線控功能,不能算真正的自動駕駛。福特、百度和谷歌這些公司做的才是真正的自動駕駛,遠(yuǎn)在特斯拉之上,兩者云泥之差,天壤之別。第一個問題是定位,自動駕駛需要的是厘米級定位。
第二個問題是路徑規(guī)劃,自動駕駛的路徑規(guī)劃第一層是點到點的非時間相關(guān)性拓?fù)渎窂揭?guī)劃,第二層是實時的毫秒級避障規(guī)劃。第三層是將規(guī)劃分解為縱向(加速度)和橫向(角速度)規(guī)劃。
第三個問題是車輛執(zhí)行機(jī)構(gòu)執(zhí)行縱向和橫向規(guī)劃,也就是線控系統(tǒng)。
目前自動駕駛的技術(shù)基本上都源自機(jī)器人,自動駕駛可以看做是輪式機(jī)器人加一個舒適的沙發(fā)。機(jī)器人系統(tǒng)中定位和路徑規(guī)劃是一個問題,沒有定位,就無法規(guī)劃路徑。厘米級實時定位是目前自動駕駛最大的挑戰(zhàn)之一。對機(jī)器人系統(tǒng)來說,定位主要靠SLAM與先驗地圖(Prior Map)的交叉對比。SLAM是Simultaneous Localization and Mapping的縮寫,意為“同時定位與建圖”。它是指運(yùn)動物體根據(jù)傳感器的信息,一邊計算自身位置,一邊構(gòu)建環(huán)境地圖的過程。目前,SLAM的應(yīng)用領(lǐng)域主要有機(jī)器人、虛擬現(xiàn)實和增強(qiáng)現(xiàn)實。其用途包括傳感器自身的定位,以及后續(xù)的路徑規(guī)劃、場景理解。
隨著傳感器種類和安裝方式的不同,SLAM的實現(xiàn)方式和難度會有很大差異。按傳感器來分,SLAM主要分為激光、視覺兩大類。其中,激光SLAM研究較早,理論和工程均比較成熟。視覺方案目前(2016)尚處于實驗室研究階段, 應(yīng)用于室內(nèi)且低速的商業(yè)化產(chǎn)品都沒用出現(xiàn),更何況遠(yuǎn)比室內(nèi)室內(nèi)復(fù)雜的高速運(yùn)動室外環(huán)境。單從這點來說,激光雷達(dá)是自動駕駛必備的傳感器。
SLAM研究自1988年提出以來,已經(jīng)過了近三十年。早期SLAM研究側(cè)重于使用濾波器理論。21世紀(jì)之后,學(xué)者們開始借鑒SfM(Structure from Motion)中的方式,以優(yōu)化理論為基礎(chǔ)求解SLAM問題。這種方式取得了一定的成就,并且在視覺SLAM領(lǐng)域中取得了主導(dǎo)地位。 人們有時候會混淆SLAM和視覺里程計的概念。應(yīng)該說,視覺里程計是視覺SLAM的一個模塊,其目的在于增量式地估計相機(jī)運(yùn)動。然而,完整的SLAM還包括添加回環(huán)檢測和全局優(yōu)化,以獲得精確的、全局一致的地圖。目前開源的視覺傳感器SLAM算法主要分三大類,稀疏法,又稱特征點法。稠密法,主要是RGB-D。半稠密法,單目和雙目用的多,是目前最火熱的領(lǐng)域。激光SLAM主要方法有Hector、Gmapping、Tiny。
機(jī)器人定位常見三大類,相對定位,絕對定位和組合定位。自動駕駛一般用組合定位,首先本體感受傳感器如里程計(Odometry)、陀螺儀(Gyroscopes)等,通過給定初始位姿,來測量相對于機(jī)器人初始位姿的距離和方向來確定當(dāng)前機(jī)器人的位姿,也叫做航跡推測。然后用激光雷達(dá)或視覺感知環(huán)境,用主動或被動標(biāo)識、地圖匹配、GPS、或?qū)Ш叫艠?biāo)進(jìn)行定位。位置的計算方法包括有三角測量法、三邊測量法和模型匹配算法等。從這個角度而言,IMU也是自動駕駛必備的部件。
同時,機(jī)器人的自主定位實際上是個概率問題,因此機(jī)器人定位算法也出現(xiàn)兩大流派,一類是卡爾曼濾波器,一類是貝葉斯推理。卡爾曼濾波器有Extended Kalman Filter(EKF),Kalman Filter (KF),Unscented Kalman Filter (UKF)定位方法。另一類是基于貝葉斯推理的定位方法。運(yùn)用柵格和粒子來描述機(jī)器人位置空間,并遞推計算在狀態(tài)空間上的概率分布,比如Markov Localization (MKV),Monte Carlo Localization (MCL)定位方法。
在地圖匹配上,必須有一幅Prior Map與之對比。這幅地圖不一定是厘米級高精度地圖。這就需要說說地圖了,地圖可以分為四大類,分別是Metric、Topologic、Sensor、Semantic。我們最常見的地圖是語義級地圖,無人駕駛不是導(dǎo)彈,一般輸入目的地應(yīng)該是語義級的,畢竟人類的交通模式還是語義級的,而非地理坐標(biāo)。這也是機(jī)器人和無人駕駛的區(qū)別之一,機(jī)器人一般不考慮語義級意義,它只需要知道自己在坐標(biāo)體系中的位置。GPS提供的則是全球坐標(biāo)系的Metric。將來的V2X會提供也會提供一幅雷達(dá)和視覺探測距離之外(NLOS)的特定物體(移動的行人和車)的地圖,或者可以叫V2X地圖。目前國內(nèi)研究階段的無人車大都是用GPS RTK定位,GPS RTK必須配合厘米級高精度地圖才能得到語義信息,所以是不可能真正無人駕駛的。
目前定位的方法主要由五種,一是用激光雷達(dá)的SLAM,二是用激光雷達(dá)的強(qiáng)度掃描圖像,三是用合成圖像,四是用高斯混合地圖,最后一種是Mobileye提出的REM。
第一種,激光雷達(dá)的SLAM,利用車輛自帶的GPS和IMU做出大概位置判斷,然后用預(yù)先準(zhǔn)備好的高精度地圖(Prior Map)與激光雷達(dá)SLAM云點圖像與之對比,或者說Registration,放在一個坐標(biāo)系內(nèi)做配準(zhǔn)。配對(Matching)成功后確認(rèn)自車位置。這是目前最成熟,準(zhǔn)確度最高的方法。

第二種,利用激光雷達(dá)的強(qiáng)度掃描圖像。激光雷達(dá)有兩種最基本的成像方式,一是3D距離成像,可以近似地理解為點云;二是強(qiáng)度掃描成像,激光經(jīng)物體反射,根據(jù)反射強(qiáng)度值的不同,可以得到一副強(qiáng)度成像圖像。強(qiáng)度值是包括在點云里的,光強(qiáng)分離核心技術(shù)之一。這種定位方法需要預(yù)先制作一個特殊的SLAM系統(tǒng),稱之為位姿圖像SLAM(Pose-GraphSLAM),勉強(qiáng)可看作激光雷達(dá)制造的高清地圖。有三個約束因素(Constraints),一是掃描匹配約束(Z),二是里程計約束(Odometry Constraints,U),GPS先驗約束(PriorConstraints)。激光雷達(dá)的3D云點地圖抽出強(qiáng)度值和真實地面(Ground Plane),轉(zhuǎn)化為2D的地面強(qiáng)度掃描圖像。與位姿圖像SLAM配對后即可定位。
第三種也有稱之為圖像增強(qiáng)型定位,通常是將Lidar和視覺系統(tǒng)結(jié)合進(jìn)行定位,用單目即可。這種方法需要預(yù)先準(zhǔn)備一幅激光雷達(dá)制造的3D地圖,用Ground-Plane Sufficient得到一個2D的純地面模型地圖,用OpenGL將單目視覺圖像與這個2D的純地面模型地圖經(jīng)過坐標(biāo)變換, 用歸一化互信息(normalized mutual information)配準(zhǔn)。然后用擴(kuò)展卡爾曼濾波器(EKF)來實現(xiàn)定位。
第四種是高斯混合模型,這實際還是第二種方法的補(bǔ)充,在遇到惡劣環(huán)境,比如很厚的積雪,雪后還有殘雪的泥濘的道路,缺乏紋理的老舊的被破壞的道路,用高斯混合模型來做定位,提高激光雷達(dá)定位的魯棒性。
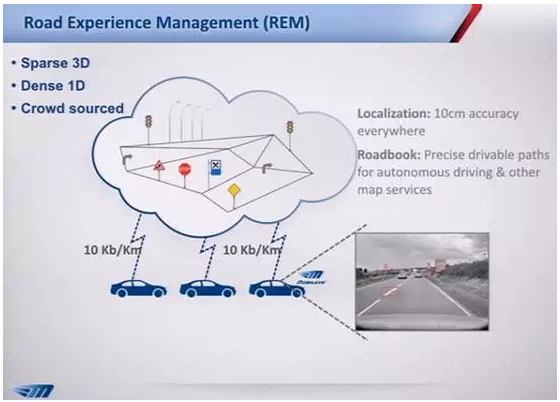
前面四種都離不開激光雷達(dá),成本頗高,但是室內(nèi)VSLAM又未達(dá)到實用地步,更不要說室外定位了。因此Mobileye提出一種無需SLAM的定位方法。這就是REM。雖然REM不用視覺SLAM,但顯然只是視覺SLAM的變種而已,Mobileye 通過采集包括交通信號、方向指示牌、長方形指示牌、路燈及反光標(biāo)等「地標(biāo)」,得到一個簡單的 3D 坐標(biāo)數(shù)據(jù);再通過識別車道線信息,路沿,隔離帶等獲取豐富的 1D 數(shù)據(jù)。把簡單的 3D 數(shù)據(jù)和豐富的 1D 的數(shù)據(jù)加起來,大小也不過是 10Kb/km,攝像頭的圖像與這種REM地圖中匹配即可定位。Mobileye這種設(shè)計毫無疑問是成本最低的,但前提是至少有上千萬輛車配備REM系統(tǒng),能夠自動搜集數(shù)據(jù)并上傳到云端,有些路段或者說非道路地區(qū),沒有裝載REM系統(tǒng)的車走過,就無法定位。在全球范圍內(nèi)讓裝載REM系統(tǒng)的車走遍每一寸土地是不可能的。這可能牽涉到隱私問題,也牽涉到數(shù)據(jù)版權(quán)問題,這些數(shù)據(jù)的版權(quán)究竟歸誰,是車主還是車企還是云端的服務(wù)商,還是Mobileye?這問題很難說清。同時REM的數(shù)據(jù)要及時更新,幾乎要做到準(zhǔn)實時狀態(tài),同時光線對數(shù)據(jù)影響明顯,REM要濾除那些不合適的數(shù)據(jù),所以維持這份地圖的有效性需要非常龐大的數(shù)據(jù)量和運(yùn)算量,誰來維護(hù)這個龐大的運(yùn)算體系?還有最致命的一點,REM是基于視覺的,只能在天氣晴好,光線變化幅度小的情況下使用,這大大限制了其實用范圍,而激光雷達(dá)可滿足95%的路況。
厘米級定位是無人駕駛的難點之一,不光是車輛本身的語義級定位,還有一個絕對坐標(biāo)定位,目前GPS定位,城區(qū)的最高精度大約10米,郊區(qū)大約5米。GPS RTK只能在小范圍應(yīng)用,覆蓋面有限,系統(tǒng)帶寬更有限,跑幾輛車湊合,上百輛系統(tǒng)可能就崩潰了。北斗地基系統(tǒng)主要做軍用,系統(tǒng)帶寬和刷新頻率有限,無法做大規(guī)模商用和車用。日本的準(zhǔn)天頂衛(wèi)星只能覆蓋中國東部少數(shù)地區(qū),并且也不是長久之計。
當(dāng)然,將來無人車的定位很難擺脫厘米級地圖,但是這只是車輛啟動前的第一次定位,車輛啟動后,利用車載激光雷達(dá)的SLAM和障礙物識別完全可以取代高精度地圖做自主導(dǎo)航。所以未來,高精度地圖的主要作用是定位而非導(dǎo)航,也無需車載,放在云端即可。





